#include <Rule.hpp>
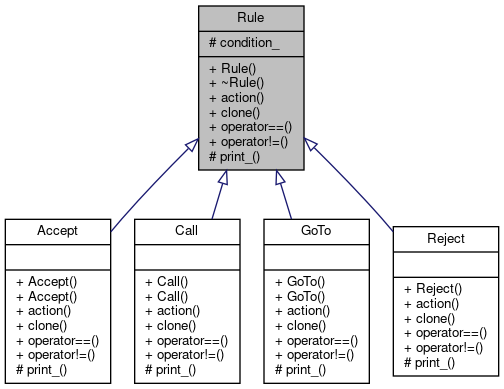
Inheritance diagram for Rule:
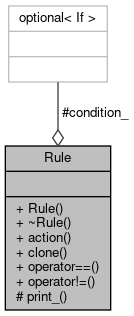
Collaboration diagram for Rule:
Public Member Functions | |
| Rule (std::optional< If > condition={}) | |
| virtual | ~Rule () |
| virtual Action | action (const Packet &packet, const MAVAddress &address) const =0 |
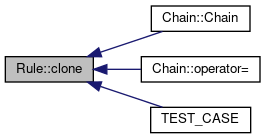
| virtual std::unique_ptr< Rule > | clone () const =0 |
| virtual bool | operator== (const Rule &other) const =0 |
| virtual bool | operator!= (const Rule &other) const =0 |
Protected Member Functions | |
| virtual std::ostream & | print_ (std::ostream &os) const =0 |
Protected Attributes | |
| std::optional< If > | condition_ |
Friends | |
| std::ostream & | operator<< (std::ostream &os, const Rule &action) |
Detailed Description
Base class of all rules, used in filter Chain's.
Rule's are used to determine an Action to take with a packet based on its type, source address, and destination address. They are very much like the rules found in a typical software defined firewalls.
Constructor & Destructor Documentation
◆ Rule()
| Rule::Rule | ( | std::optional< If > | condition = {} | ) |
◆ ~Rule()
Member Function Documentation
◆ action()
|
pure virtual |
Decide what to do with a Packet.
Determine what action to take with the given packet sent to the given address. The possible actions are documented in the Action class. The continue object is always returned if the condition was set and does not match the packet/address combination.
- Parameters
-
packet The packet to determine whether to allow or not. address The address the packetwill be sent out on if the action dictates it.
- Returns
- The action to take with the packet. If this is the accept object, it may also contain a priority for the packet.
Implemented in GoTo, Call, Accept, and Reject.
Here is the caller graph for this function:

◆ clone()
|
pure virtual |
◆ operator!=()
|
pure virtual |
◆ operator==()
|
pure virtual |
◆ print_()
|
protectedpure virtual |
Friends And Related Function Documentation
◆ operator<<
|
friend |
Print the given rule to the given output stream.
- Note
- This is a polymorphic print, it will work on any child of Rule even if the pointer/reference is to the base class Rule.
Some examples are:
acceptaccept with priority 3reject if ENCAPSULATED_DATAcall gcs_in if from 192.168goto autopilot_out
- Parameters
-
os The output stream to print to. rule The rule (or any child of Rule) to print.
- Returns
- The output stream.
Member Data Documentation
◆ condition_
The documentation for this class was generated from the following files:
